Wenn wir von Bewegungssteuerung sprechen, denken wir im Allgemeinen an Hochgeschwindigkeitssysteme mit schnellen Richtungsänderungen. Die Steuerung von Bewegungen unter diesen Bedingungen stellt zweifellos eine große technische […]

Wenn wir von Bewegungssteuerung sprechen, denken wir im Allgemeinen an Hochgeschwindigkeitssysteme mit schnellen Richtungsänderungen. Die Steuerung von Bewegungen unter diesen Bedingungen stellt zweifellos eine große technische Herausforderung dar. Technische Herausforderungen ergeben sich, wenn man Bewegungen mit extrem niedriger Geschwindigkeit steuern will, typischerweise bei Teleskopen oder Ausrichtungssystemen, CCTV-Kameras und allgemein bei Überwachungssystemen. In dieser Sitzung werden die Probleme untersucht, die sich bei einem System mit ultralangsamer Geschwindigkeit aus der Perspektive des Positions- oder Geschwindigkeitssensors und des Bewegungssteuerungsgeräts ergeben.
Bei einer mobilen PTZ (Pan/Tilt/Zoom)-Schwenk-/Neige-/Zoom-Kamera, die gemeinhin als “Gimbal-System” für die Videoüberwachung von Grenzen bezeichnet wird, ist es nicht ungewöhnlich, dass man auf Objekte fokussieren muss, die bis zu 20 km von der Kamera entfernt sind. Wenn sich das Objekt bewegt, wird es schwierig, es zu verfolgen, da das Sichtfeld sehr eng ist und das Objektiv schnell verschwinden kann.
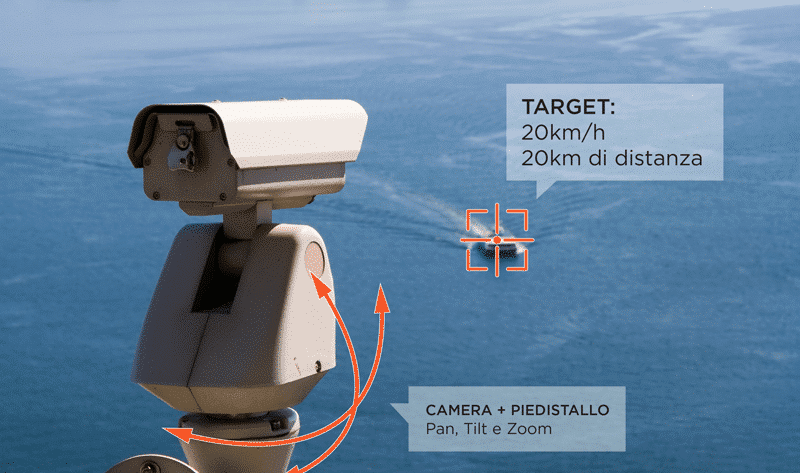
Wenn sich das Ziel in 20 km Entfernung mit 20 km/h bewegt, muss sich die Kamera mit 0,05 U/min drehen, was eine ausgesprochen niedrige Geschwindigkeit ist. Um das Ziel innerhalb des sichtbaren Bereichs und in Bezug auf den Bereich selbst zentriert zu halten, muss man diese sehr niedrige Geschwindigkeit sorgfältig kontrollieren und seine Richtungsänderungen schnell verfolgen. Die Verwendung von 18- bis 22-Bit-Drehgebern mit einer Auflösung von 4194304 Zählungen/Umdrehung ist daher unerlässlich, um auch bei sehr niedrigen Geschwindigkeiten flüssige Bewegungen zu gewährleisten.
Der traditionelle Ansatz verwendet einen Encoder am Motor, der mit einem Getriebe gekoppelt ist. Je größer das Untersetzungsverhältnis ist, desto größer ist die Auflösung des Encoders, die von der Steuerung wahrgenommen wird, und desto weniger dynamisch und reaktionsschnell ist das Gesamtsystem und desto größer ist das mechanische Spiel. All dies führt dazu, dass bewegte Objekte nicht mehr verfolgt werden können, es sei denn, sie befinden sich in einer geringen Entfernung. Die Alternative ist die Verwendung eines hochauflösenden Encoders direkt auf der Getriebeausgangswelle, um den Positionsregelkreis gleichzeitig mit dem Encoder auf dem Motor zu schließen, der für den Geschwindigkeitsregelkreis verantwortlich ist; diese Art der Regelung wird als Dual-Loop bezeichnet und gewährleistet, dass das Getriebespiel eliminiert wird, was zu einem hochdynamischen System führt. Dieser Ansatz wird aufgrund der heute verfügbaren hochauflösenden Positionssensoren und der Entwicklung einer leistungsfähigen Bewegungssteuerung angewandt.
Traditionelle hochauflösende Encoder
Wenn von hochauflösenden Drehgebern die Rede ist, die mehr als 18 Bit bzw. 1000000 Zählungen/Umdrehung aufweisen, werden in der Regel Lösungen mit Resolvern, optischen oder kapazitiven Drehgebern genannt. Hochauflösende Resolver sind bekanntermaßen teuer und können aufgrund ihres Platzbedarfs, ihres Gewichts und der engen mechanischen Montagetoleranzen technische Probleme verursachen. Optische oder kapazitive Ringgeber sind ähnlich teuer und erfordern eine Präzisionsmechanik für den Einsatz. Im Gegensatz zu Resolvern, die sehr robust sind, sind optische Encoder durch die Verwendung von Glasscheiben sehr empfindlich gegenüber Vibrationen und Stößen, und die Betriebstemperatur ist sehr begrenzt. Sowohl die optischen als auch die kapazitiven Versionen leiden unter Zuverlässigkeitsproblemen in Gegenwart von Staub oder Kondensation. Hochauflösende optische Sensoren, die geätzte Glasscheiben verwenden, sind besonders empfindlich gegenüber Fremdkörpern.
Induktive Drehgeber der nächsten Generation
Herkömmliche Techniken zur Erreichung hoher Auflösungen stoßen an ihre Grenzen; die Nachfrage nach innovativen Lösungen wächst. Eine Antwort auf diese Anforderungen bietet die neue Generation von induktiven Drehgebern, die Auflösungen von bis zu 4 Millionen Zählungen pro Umdrehung (22 Bit) bieten. Induktive Drehgeber, die manchmal auch als “IncOder” bezeichnet werden, sind mechanisch genauso robust wie Resolver, bieten hohe Auflösungen ohne Kontaktteile, können in schmutzigen Umgebungen arbeiten, da sie unempfindlich gegenüber Staub und Fremdkörpern sind, und schließlich können sie auch in Gegenwart von Flüssigkeiten oder Kondenswasser arbeiten; sie sind die Lösung für Konstrukteure von Drehgebern, die in rauen Umgebungen arbeiten müssen, ohne dass sie in wasserdichten Gehäusen untergebracht werden müssen, wie es bei der Verwendung von optischen oder kapazitiven Drehgebern erforderlich ist. Diese neuen Positionssensoren können problemlos mit den Steuerungen der nächsten Generation von Galil verwendet werden. Abtastzeiten von weniger als 100µsec ermöglichen eine optimale Steuerung von Motoren, die sich mit sehr niedrigen Drehzahlen drehen. Dank der Bandbreite von 20 MHz kann gleichzeitig ein hervorragendes System auch bei hohen Geschwindigkeiten erreicht werden. Die Integration von “Dual Loop”-Regelung und speziellen Resonanzfiltern ermöglicht eine schnelle und effektive Inbetriebnahme.