Auf den ersten Blick mögen sich kapazitive und induktive Drehgeber sehr ähnlich sein, und die Aspekte, die sie voneinander unterscheiden, können verwirrend erscheinen. Beide verwenden eine […]
Auf den ersten Blick mögen sich kapazitive und induktive Drehgeber sehr ähnlich sein, und die Aspekte, die sie voneinander unterscheiden, können verwirrend erscheinen. Beide verwenden eine berührungslose Technik zur Positionsmessung und können auf Leiterplatten aufgebaut werden. Die physikalischen Prinzipien, auf denen sie beruhen, sind jedoch recht unterschiedlich. Dieser Artikel erläutert diese Unterschiede, indem er die Vor- und Nachteile beider Lösungen vergleicht.
Kapazitive Sensoren – Funktionsprinzip
Die Entdeckung der Möglichkeit, große Mengen elektrischer Energie zu speichern, ist dem Wissenschaftler Ewald George von Kleist zu verdanken, dem Erfinder des ersten Kondensators. Dieses Bauteil besteht aus zwei leitenden Platten (oder Flächen), die durch ein dielektrisches Material, in der Regel Luft, Kunststoff oder Keramik, getrennt sind. Ein einfaches mathematisches Modell des Kondensators ist in Abbildung 1 dargestellt.
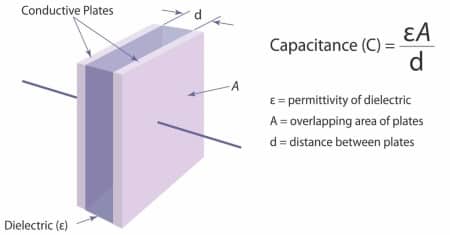
Die Dielektrizitätskonstante Ԑ, d. h. die Menge an elektrischer Energie, die von einem nichtleitenden Material, das einem elektrischen Feld ausgesetzt ist, zurückgehalten wird, besteht aus zwei Teilen Ԑr und Ԑ0, wobei Ԑr die relative statische Dielektrizitätskonstante (auch Dielektrizitätskonstante genannt) des Materials zwischen den beiden Platten und Ԑ0 die statische Dielektrizitätskonstante im Vakuum ist. (Ԑ0 = 8,854E-22 F/m).
The capacitive principle is used in devices such as telephones, tablets, and cell phones that employ touch screen technology, meaning they detect the presence or absence of a finger due to the change in the dielectric constant Ԑr that goes into changing capacitance.
A second application is the capacitive displacement sensor, i.e., a capacitive linear scale or rotary capacitive encoder; these sensors work on the change in capacitance between capacitor faces. As shown in Figure 1, capacitance varies in proportion to the distance between the faces (d) and the area of overlap (A). The displacement can be measured axially by varying d or in the planar direction by varying the overlap area A. The capacitor faces can be constructed using printed circuit boards, which provides a significant cost-effective advantage. To store any significant amount of charge, the size d must be small relative to the area of the plates. Usually, d is 1 mm. Linear or rotary capacitive sensors are constructed so that displacement causes a change in A or d. In other words, one face is on the moving element of the sensor, while the other is on the fixed element. As the 2 elements move apart, the capacitance surface C of the capacitor changes.
Leider wird die Dielektrizitätskonstante auch von anderen Faktoren als der Verschiebung beeinflusst. Wenn das dielektrische Material von Luft umgeben ist, ändert sich seine Dielektrizitätskonstante sowohl mit der Temperatur als auch mit dem Vorhandensein von Feuchtigkeit; tatsächlich hat Wasser eine andere Dielektrizitätskonstante als Luft; wenn sich die Dielektrizitätskonstante ändert, ändert sich auch die Kapazität entsprechend. Sofern das dielektrische Material nicht versiegelt ist, sind kapazitive Sensoren nicht für den Einsatz in Umgebungen mit hohen Temperaturschwankungen oder der Wahrscheinlichkeit von Kondensation und/oder Feuchtigkeitsschwankungen geeignet. Da der Abstand zwischen den Sensorflächen im Verhältnis zur Größe der Sensorflächen sehr gering sein muss, ist für den Einbau eine hohe mechanische Präzision erforderlich. Dieser Faktor führt zu einem erheblichen Anstieg der Installationskosten; außerdem müssen die Wärmeausdehnung und der Einfluss der Struktur außerhalb des Sensors berücksichtigt werden, die den Abstand zwischen den Flächen des Kondensators beeinträchtigen und die Messung verfälschen können.
Darüber hinaus beruht der kapazitive Effekt auf der Erhaltung der elektrischen Ladung im Kondensator. Wenn das System um den Sensor herum elektrostatische Ladungen erzeugt, können diese die Messung beeinträchtigen. Im Extremfall funktioniert der Sensor überhaupt nicht, oder, was noch schlimmer ist, die elektrostatische Störung führt zu einer glaubwürdigen, aber fehlerhaften Messung. Die Erdung des mechanischen Systems, an dem der Sensor installiert ist, kann eine Lösung sein und ist für kapazitive Winkelsensoren unerlässlich, bei denen die rotierende Welle statische Aufladungen durch Wälzlager, Zahnräder oder Riemenscheiben erzeugt.
Induktive Sensoren – Funktionsprinzip
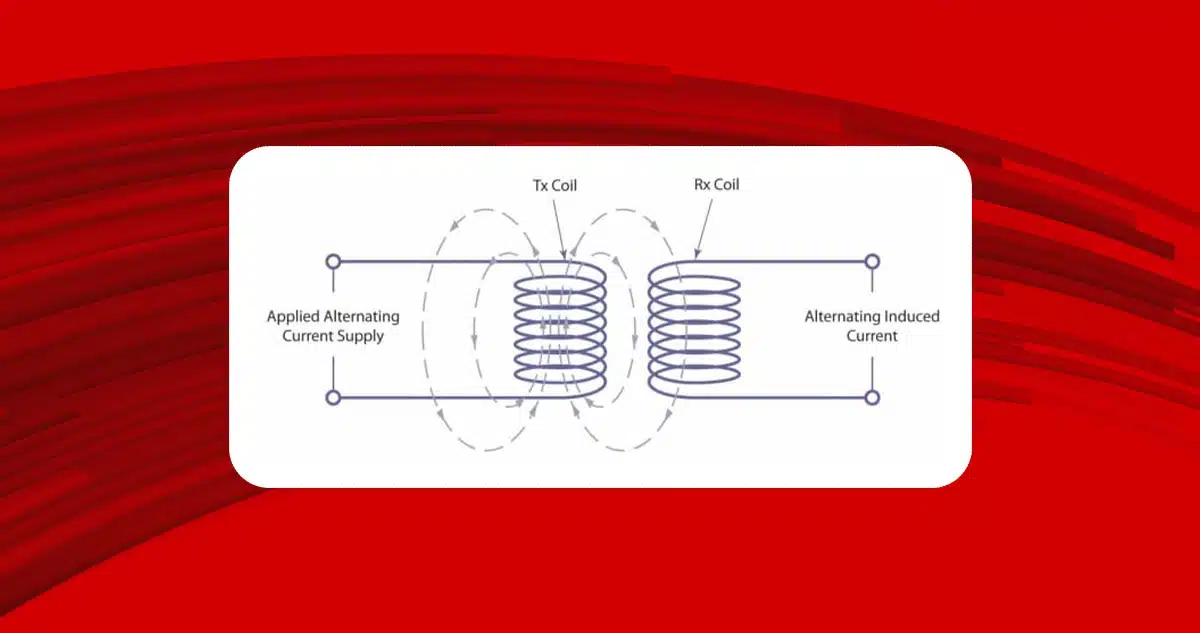
1831 entdeckte Michael Faraday, dass ein Wechselstrom, der durch einen Leiter fließt, in einem zweiten Leiter, der neben dem ersten liegt, einen Strom in entgegengesetzter Richtung induzieren kann. Dieses Induktionsprinzip wird häufig für die Positions- und Geschwindigkeitsmessung in Resolvern, Synchros und LVDTs verwendet. Die grundlegende Theorie lässt sich erklären, wenn man zwei Wicklungen betrachtet, von denen eine als Sender (Tx) bezeichnet wird, an die ein Wechselstrom angelegt wird, und die zweite als Empfänger (Rx) fungiert, in den ein Strom induziert wird:
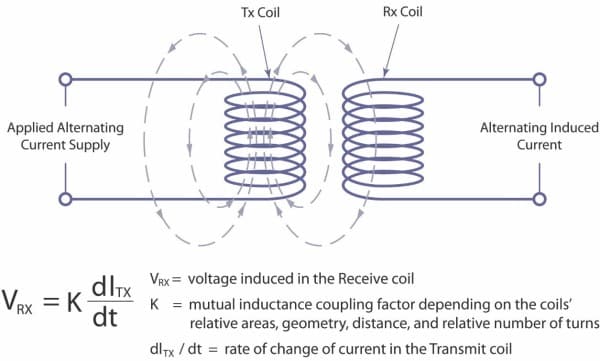
Die Spannung in der Empfangswicklung ist eine Funktion der Fläche der Spulen und der Geometrie des Abstands zwischen ihnen. Wie bei kapazitiven Sensoren können jedoch auch bei induktiven Sensoren mehrere Faktoren das Verhalten der Spulen beeinflussen. Einer davon ist die Temperatur, die jedoch durch den Einsatz mehrerer Empfangsspulen und die Berechnung der Position aus der Differenz zwischen den empfangenen Signalen (wie bei einem Differenzialtransformator) einfach eliminiert werden kann. Wenn sich also die Temperatur ändert, wird der Effekt aufgehoben, da die Differenz zwischen den empfangenen Signalen für eine bestimmte Position unverändert bleibt.
Im Gegensatz zu Systemen mit kapazitiver Technologie sind Systeme mit induktiver Technologie weniger anfällig für äußere Einflüsse wie Wasser und Partikel. Da die Spulen weit voneinander entfernt sein können, ist die mechanische Präzision bei der Installation weniger wichtig, und die beiden Elemente, das feste und das bewegliche, haben relativ hohe Montagetoleranzen. Dies trägt zur Senkung der Installationskosten bei und ermöglicht die Verkapselung der Komponenten, so dass die Sensoren externen Belastungen wie Vibrationen standhalten und gegen gasförmige Stoffe oder Staub immun sind.
Induktive Sensoren bieten eine optimale Lösung für Gehäuseanwendungen in speziellen Umgebungen, wie sie für Anwendungen in der Verteidigung, der Luft- und Raumfahrt und der Ölindustrie typisch sind.
Einer der größten Nachteile induktiver Sensoren besteht darin, dass sie Ferritspulen verwenden, die mit besonderer Genauigkeit gebaut werden müssen, um eine genaue Positionsmessung zu erhalten. Um ein stabiles elektrisches Signal zu erhalten, müssen viele Spulen verwendet werden, was sie sperrig, schwer und teuer macht.
Induktive Sensoren gelten als besonders empfindlich gegenüber elektromagnetischen Störungen, doch der erfolgreiche Einsatz von Resolvern als geeignetes Element für die Steuerung von Schaltvorgängen und die Regelung der Motordrehzahl widerlegt diese Theorie vollständig. Sowohl Resolver als auch LVDTs sind seit vielen Jahren die Lösung für Anwendungen in der Luft- und Raumfahrt oder im zivilen Bereich.
Ein anderer Ansatz für induktive Sensoren
Ein anderer Ansatz für induktive Sensoren ist die Verwendung der Laminardrucktechnologie zur Herstellung der Spulen anstelle von Ferritspulen, und dies ist die von Zettlex verwendete Lösung. Dies bedeutet, dass die Wicklungen aus Kupfer hergestellt werden können, das auf verschiedene Arten von Polyester- oder Papierfolien geätzt oder gedruckt oder auf Keramik laminiert wird. Auf diese Weise lassen sich mit sehr präzisen Wicklungen viel höhere Messleistungen bei niedrigen Kosten und geringem Gewicht der Wicklungen erzielen, wobei die Robustheit erhalten bleibt.
Zettlex IncOders sind berührungslose Vorrichtungen zwischen den beiden Hauptelementen, die jeweils die Form eines Rings haben. Die große Bohrung erleichtert die Montage auf Durchgangswellen, Schleifringen, Lichtwellenleitern, Rohren und Kabeln. IncOrder erfordert keine mechanische Montage mit hohen Toleranzen, der Rotor und der Stator können einfach mit den mechanischen Teilen der Maschine verschraubt werden. Externe Elemente haben keinen Einfluss auf die Messung, und sie sind ideal für raue Umgebungen, in denen kapazitive Geräte unzuverlässig sein könnten.
Zusammenfassend
Die Vorteile der drei verschiedenen Sensoren sind in der nachstehenden Tabelle aufgeführt. Es ist ersichtlich, dass von den drei Systemen das von Zettlex eingesetzte System mit einem nicht-traditionellen induktiven Ansatz die meisten Vorteile aufweist.
| Kapazitiv | Induktiv (traditionelle Spulen) | Induktiv (gedruckte Spulen) | |
| Hohe Auflösung | X | X | X |
| Hohe Reproduzierbarkeit | X | X | X |
| Hohe Genauigkeit | X | X | X |
| Unempfindlichkeit gegenüber Schmutz, Wasser oder Kondensation | X | X | |
| Widerstandsfähigkeit gegenüber elektrostatischen Effekten | X | X | |
| Robuster EMC-BetriebNiedrige thermische Drift | X | X | X |
| Geringe thermische Drift | X | ||
| Einfach zu installieren | ? | X | |
| Kompakt | X | X | |
| Leichtgewicht | X | X | |
| Wirtschaftlich | ? | X |


