Die wichtigsten Merkmale für die Leistung eines Schrittmotors sind präzise Positionierung, ein gutes Stillstandsmoment und ein gutes Drehmoment bei niedriger Drehzahl. Einige Anwendungen erfordern jedoch ein […]
Die wichtigsten Merkmale für die Leistung eines Schrittmotors sind präzise Positionierung, ein gutes Stillstandsmoment und ein gutes Drehmoment bei niedriger Drehzahl. Einige Anwendungen erfordern jedoch ein hohes Drehmoment bei hoher Geschwindigkeit, und die Konstruktions-/Steuerungsspezifikationen verlangen den Einsatz eines Schrittmotors. Obwohl Schrittmotoren nicht für ihre Fähigkeit bekannt sind, ein hohes Drehmoment bei hoher Geschwindigkeit zu erzeugen, kann dies bei bestimmten Anwendungen erreicht werden.
Warum ist es für Schrittmotoren schwierig, ein hohes Drehmoment bei hohen Drehzahlen zu liefern?
Der typische Aufbau eines Schrittmotors bedeutet, dass das abgegebene Drehmoment direkt proportional zum Strom ist, der durch die Motorwicklungen fließt: je höher der Strom, desto höher das vom Motor abgegebene Drehmoment. Die Wicklungen haben jedoch zwei Eigenschaften, die den Strom und damit die Erzeugung des Drehmoments begrenzen. Die erste ist ihre Induktivität (L), die dafür sorgt, dass die Wicklungen jeder Änderung des durch sie fließenden Stroms widerstehen. Die andere ist ihr Widerstand (R), der die maximale Stromstärke begrenzt, die durch die Wicklung fließen kann.
In Kombination bestimmen diese beiden Faktoren die elektrische Zeitkonstante (τe) des Motors, d. h. die Zeit, die der Wicklungsstrom benötigt, um 63 % seines Nennwerts (Maximum) zu erreichen.
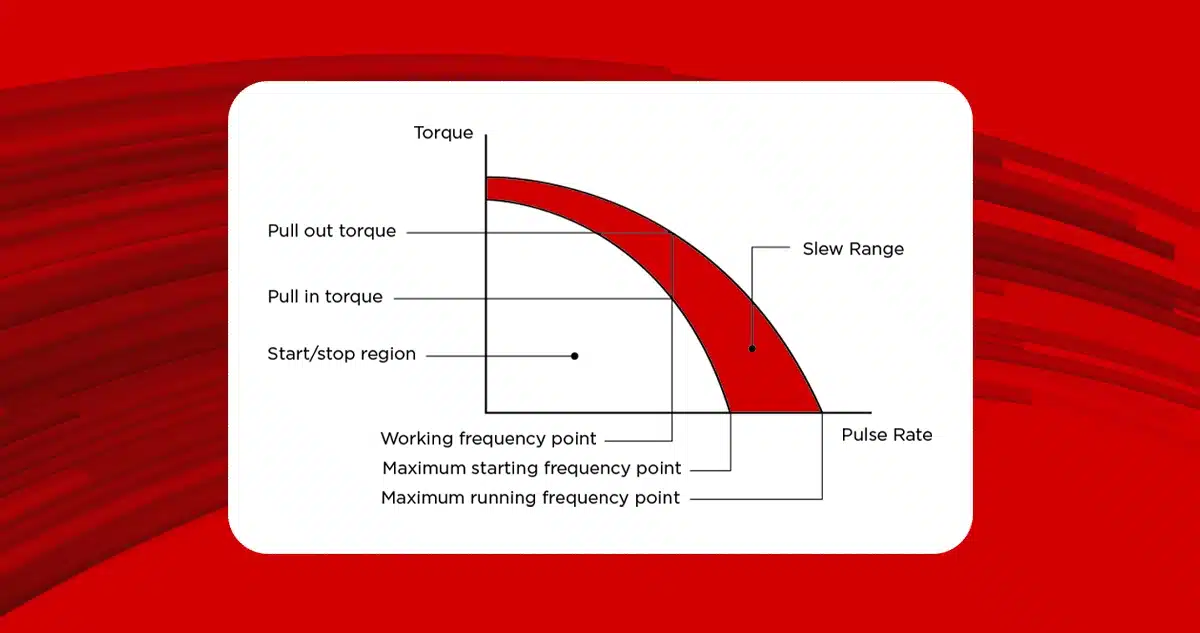
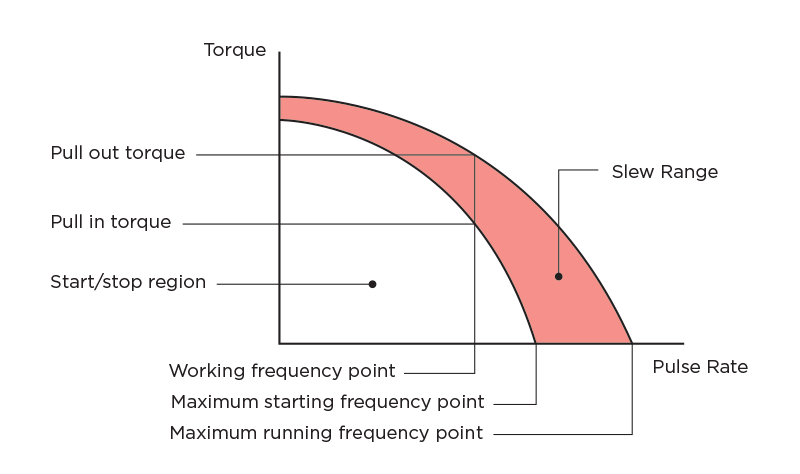
Wenn die Frequenz der an die Wicklungen gelieferten Spannungsimpulse (und damit die Motordrehzahl) niedrig ist, haben die Wicklungen genügend Zeit, um ihren Nennstrom zu erreichen, und der Motor kann sein Nenndrehmoment abgeben. Wenn die Frequenz der Spannungsimpulse (Motordrehzahl) jedoch hoch ist, hat der Wicklungsstrom nicht genügend Zeit, um seinen Nennwert zu erreichen, und dies verschlechtert die Drehmomentabgabe.
Ein weiterer Faktor, der die Drehmomentabgabe von Schrittmotoren bei hohen Drehzahlen begrenzt, ist die Anstiegsgeschwindigkeit des Stroms in den Wicklungen (dI/dt), die direkt proportional zur angelegten Spannung (V) und umgekehrt proportional zur Motorinduktivität (L) ist.
Um die Stromanstiegsgeschwindigkeit zu verbessern, muss entweder die Induktivität der Wicklung (L) verringert oder die angelegte Spannung (V) erhöht werden.
Die einzige Möglichkeit, die Induktivität der Wicklungen zu verringern, besteht in einer Änderung der Motorkonfiguration oder der Produktionsverfahren. In der Tat haben einige Hersteller ihre Produktionsverfahren geändert und bieten nun Schrittmotoren mit höheren Drehmoment-/Drehzahl-Eigenschaften an, als sie von herkömmlichen Konfigurationen geboten werden. Zu diesen Änderungen gehören verbesserte magnetische Konfigurationen zur Erhöhung des Flusses zwischen Rotor und Stator, wodurch die Anzahl der Motorpolpaare und die Dichte der Wicklungen erhöht wird.
Für Maschinenhersteller und Endanwender kann die Drehmomentabgabe eines bestimmten Schrittmotors jedoch häufig durch einen Chopper-Antrieb verbessert werden.
Das “Chopping” der Antriebsspannung sorgt für verbesserte Drehmoment-/Drehzahl-Eigenschaften
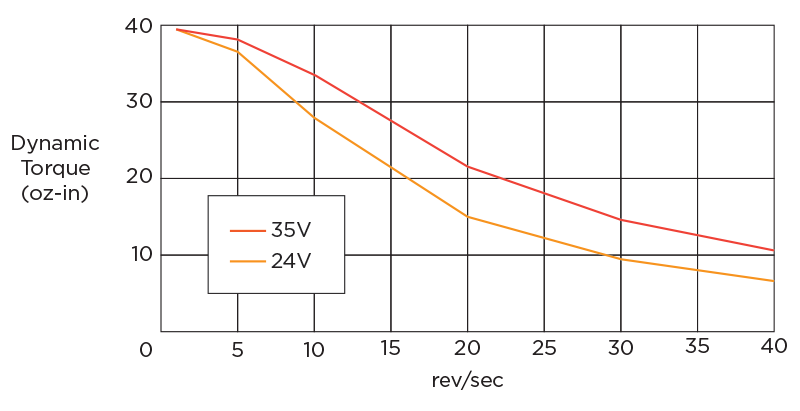
Chopper-Antriebe versorgen den Motor mit einer hohen Spannung (oft bis zum Achtfachen der Nennspannung), die nach dem Ohmschen Gesetz (Strom = Spannung ÷ Widerstand) den Strom durch die Wicklungen erhöht.

Diese Methode der Spannungsabsenkung verbessert auch die Stromanstiegsrate (dI/dt). Durch die Erhöhung der Ansteuerspannung können die Wicklungen auch bei hoher Spannungsimpulsfrequenz ein höheres Stromniveau erreichen, was bedeutet, dass der Motor mehr Drehmoment bei höherer Drehzahl liefern kann.
Chopper-Antriebe werden manchmal auch als Konstantstrom-Antriebe bezeichnet, da sie im Vergleich zu einem herkömmlichen Antrieb, der den Motor mit einer konstanten Spannung versorgt, einen relativ konstanten Strom in den Wicklungen erzeugen. Dieser Stromzerhackungsansatz ermöglicht auch die Mikroschrittsteuerung von Schrittmotoren.