Dieses Papier beschreibt die synchrone serielle Schnittstelle (SSI), die in vielen Positionssensoren und -reglern verwendet wird. Es richtet sich an Elektro- und Maschinenbauingenieure, die Positionserfassungssysteme entwickeln […]

Dieses Papier beschreibt die synchrone serielle Schnittstelle (SSI), die in vielen Positionssensoren und -reglern verwendet wird. Es richtet sich an Elektro- und Maschinenbauingenieure, die Positionserfassungssysteme entwickeln und verstehen möchten, wie die SSI-Schnittstelle funktioniert und wie man ihre Vorteile bewertet, ohne zu sehr ins Detail zu gehen.
Einführung
Sensoren, die lineare oder winklige Positionen messen, lassen sich in zwei Gruppen einteilen: inkrementale und absolute. Die Frage “Was passiert, wenn Sie ihn einschalten?” ist ein guter Anhaltspunkt, um festzustellen, zu welcher Gruppe ein Sensor gehört. Wenn der Sensor einen Kalibrierungsschritt durchführen muss, um seine Position zu finden, ist er inkrementell, ansonsten ist er absolut. Die meisten technischen Spezifikationen enthalten immer noch inkrementelle Positionssensoren, da absolute Sensoren als zu teuer angesehen werden. Heutzutage kosten absolute Sensoren jedoch nicht mehr so viel mehr. Da die Benutzer von Automatisierungsgeräten und -systemen nicht mehr bereit sind, lange Anlaufzeiten in Kauf zu nehmen, steigt die Zahl der absoluten Sensoren.
In den 1980er und 1990er Jahren erzeugten viele absolute Positionssensoren einen parallelen Ausgang. Die Einsen und Nullen eines Binärwerts oder Gray-Codes wurden durch mehrere Drähte (oft ein Flachbandkabel) mit einem hohen oder niedrigen Logikpegel dargestellt. Dieser Ansatz ist wegen seiner relativ hohen Kosten, Größe, Komplexität und Zuverlässigkeit, insbesondere bei Präzisionssensoren, nicht mehr gefragt. Ein Sensor mit einem parallelen 20-Bit-Ausgang würde mindestens 20 separate Signaldrähte erfordern. Während dies bei einem einzelnen Sensor kein großes Problem darstellt, wird diese Konfiguration z. B. bei einem Roboter mit zahlreichen Sensoren, Motoren und Stromleitungen zu einem Albtraum.
Allgemeine Elemente der SSI-Schnittstelle
Die SSI basiert auf dem weit verbreiteten Hardware-Standard RS-422. In dieser Norm werden die elektrischen Eigenschaften von Signalisierungsschaltungen spezifiziert, die sich auf die Definition von Signalpegeln beschränken. Mit anderen Worten, die grundlegende Hardware ist definiert, während andere Spezifikationen, wie z. B. elektrische Anschlüsse, Stifte und Verdrahtung, vom Entwickler frei gewählt werden können. Die von der SSI-Schnittstelle verwendeten RS-422-Schaltkreise ermöglichen eine zuverlässige und schnelle Datenübertragung über große Entfernungen und in geräuschvollen Umgebungen, ohne dass sperrige Elektronik, Kabel und Steckverbinder erforderlich sind. Durch symmetrische oder differentielle Signalisierung können hohe Datenraten und große Entfernungen erreicht werden. Differenziell bedeutet, dass, wenn eine Leitung auf dem hohen Pegel ist, die andere auf dem niedrigen Pegel ist, und umgekehrt.
SSI kann beschrieben werden als … tief durchatmen … ein serieller synchroner Ende-zu-Ende-Kommunikationskanal für die digitale Datenübertragung. Puh. “Ende-zu-Ende” ist kein komplexes Bus- oder Netzwerksystem mit mehreren Knotenpunkten. “Synchron” bedeutet, dass ein Taktsignal die Datenübertragung synchronisiert. “Seriell” bedeutet, dass es sich nicht um eine parallele Übertragung handelt; daher werden mehrere Datenbits auf derselben Leitung gesendet. Die Datenübertragung erfolgt zwischen einem “Master” (in der Regel eine Steuerung), der das Taktsignal sendet, und einem “Slave” (in der Regel ein absoluter Positionssensor), der die Daten oder Werte erzeugt.
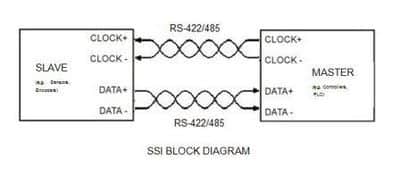
RS-422 verwendet Nominalsignalpegel von 0 bis 5 V und in der Regel ein Kabel, das aus zwei Sätzen verdrillter Paare (eines für Daten- und eines für Taktsignale) und einer Erdungsleitung besteht, wie in Abbildung 1 dargestellt. Während ein Kabel mit zwei Paaren in vielen RS-422-Anwendungen eine praktische Lösung sein kann, definiert die Spezifikation nur den Signalweg, ohne eine Funktion zuzuweisen. Die meisten SSI-Kabel verwenden verdrillte Paare mit einer Metallfolie oder einem Metallgeflecht, das als elektromagnetische Abschirmung auf jedem Paar und/oder dem gesamten Bündel unter dem allgemeinen Kabelmantel dient.
Bei SSI sind für Daten- und Taktübertragungen über Kabellängen von etwa 20 m in der Regel keine besonderen Vorkehrungen erforderlich. Entfernungen von 20 m genügen den Anforderungen der meisten Positionssensoranwendungen. Bei Kabellängen von mehr als 20 m sollten die Kabellängen zwischen dem Positionssensor und dem Controller auf ein Minimum reduziert werden. Während bei Kabellängen von 10 oder 20 m (24 AWG) hohe Datenraten von ca. 10 Mbit/Sekunde problemlos erreicht werden können, ist es bei Längen über 20 m notwendig, die Sensordatenraten zu reduzieren, wie in Abbildung 2 dargestellt.
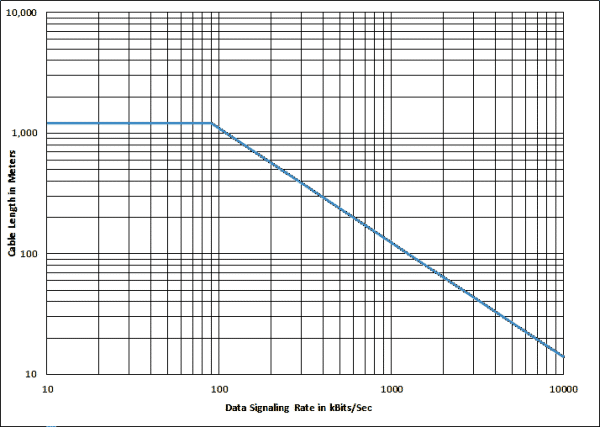
Die obigen Daten basieren auf 24 AWG-Drähten; die Kabellängen können bei 22 oder 20 AWG-Querschnitten länger sein. Die maximale Kabellänge hängt von der tolerierbaren Signalverzerrung, den lokalen elektromagnetischen Störpegeln und den Erdpotentialdifferenzen zwischen den Kabelenden ab.
Die technischen Merkmale der SSI im Vergleich zu anderen Schnittstellen sind:
- Niedrige Kosten durch:
- Reduced number of electronic components
- nur 4 Drähte
- Slaves oder Sensoren, die den Takt des Masters verwenden und keine Präzisionsoszillatoren benötigen
- die breite Verfügbarkeit von Steckern und Kabeln
- Sichere Datenausgabe mit der Fähigkeit, Fehler zu erkennen und Parität zu melden
- Unempfindlichkeit gegenüber elektromagnetischen Störungen
- Möglichkeit der Verwendung von Kabeln mit beträchtlichen Längen bis hin zu Tausenden von Metern
- einfache elektrische Isolierung zwischen Sensor und Host
- Die Datenübertragung wird mit einem Taktsignal synchronisiert.
- hohe Baudraten bis zu 10 Mbit/Sekunde
- eine bestimmte Nachrichtengröße schränkt die Flexibilität nicht ein – die Anzahl der Bits in einer Nachricht
- Möglichkeit, mehrere Slaves an eine Standarduhr anzuschließen.
Manchmal werden Ingenieure zwischen SSI, RS-422 und RS-485 verwirrt. SSI ist die serielle Kommunikationsmethode, die RS-422-Hardware-Standards verwendet. RS-485 ist ein komplexeres Mehrknotensystem oder ein Bus. Mit RS-422 kann kein echtes Mehrpunkt-Kommunikationsnetzwerk implementiert werden, da es in jedem Leitungspaar nur einen Treiber geben kann; trotzdem können mehrere Sensoren das gleiche Taktsignal verwenden.
SSI-Takt- und Datenübertragung
Der Master (oder Controller) steuert die Taktsignale, und der Slave (Positionssensor) überträgt die Daten oder Werte. Wenn der Master die Daten abruft, werden sie vom Slave im Takt ausgegeben und normalerweise in einem Schieberegister gespeichert. Der Taktgeber synchronisiert Master und Slave. Die Daten werden mit symmetrischen oder differentiellen Signalen übertragen. Das bedeutet, dass die CLOCK- und DATA-Leitungen paarweise verdrillt sind. Die Taktfolge wird vom Master eingeleitet, wenn Daten oder Werte benötigt werden. Es können verschiedene Taktfrequenzen von 100 kHz bis 2 MHz verwendet werden, und die Anzahl der Takte hängt davon ab, wie viele Datenbits übertragen werden müssen. Das Datenübertragungsprotokoll basiert auf drei verschiedenen aufeinander folgenden Teilen (“1″ Start -> Datenbits -> “0” Ende). Dadurch wird die Zuverlässigkeit und Sicherheit der Datenübertragung ohne Hardware- und Softwarefehler erreicht.
Die SSI befindet sich zunächst im Idle-Modus, in dem die CLOCK- und DATA-Leitungen auf High-Pegel bleiben und der Slave seine Daten weiter aktualisiert. Indem die CLOCK- und DATA-Ausgänge im Idle-Modus auf einem hohen Pegel gehalten werden, können durch Drahtbrüche verursachte Kontakte erkannt werden.
Wie in Abbildung 3 zu sehen ist, beginnt mit der ersten fallenden Flanke nach der Zeit Tmu der Lesezyklus und die Datenübertragung. Jede steigende Flanke des CLOCK überträgt das nächste Datenbit der Nachricht, beginnend mit Dn-1. Nach der letzten steigenden Flanke der Taktsequenz wird die Datenleitung für den Zeitraum Tmu – 0,5xt durch das Fehlerflag (falls unterstützt) gesetzt. Am Ende von Tmu stehen die letzten Positionsdaten für die Übertragung im nächsten Lesezyklus zur Verfügung.
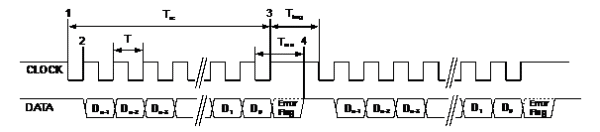
- T: eine Periode des Taktes (1/T = von 100 kHz bis 2 MHz)
- Trc: Lesezykluszeit. Sie ist definiert als (n x T) + (0,5 x T)
- Tmu: Aktualisierungszeit der Nachricht. Das Zeitintervall zwischen der letzten fallenden Flanke des Taktgebers und dem Zeitpunkt, zu dem neue Daten zur Übertragung bereit sind.
- Timg: Zeit zwischen den Meldungen. Muss >Tmu sein, sonst sind die Positionsdaten unbestimmt
- n: Anzahl der Bits in der Nachricht (Fehlerkennzeichen nicht eingeschlossen).
Nach n CLOCK-Impulsen (steigenden Flanken) wird der Datenwert übertragen. Mit dem nächsten CLOCK-Impuls (n+1 steigende Flanke) geht der Sensorausgang auf Low. Die Schnittstelle wird kurzgeschlossen, wenn sie auch nach n+1 steigenden Flanken auf High-Pegel ist.
Durch den Anschluss an eine gemeinsame Uhr können die Messwerte von mehreren Slaves (bis zu drei) gleichzeitig erfasst werden. Um Masseschleifen zu vermeiden und den Slave elektrisch zu isolieren, ist eine vollständige galvanische Trennung durch Optokoppler erforderlich.
Eine Mehrfachübertragung derselben Daten vom Positionssensor erfolgt nur bei kontinuierlichen Takten, auch nach Übertragung des niederwertigsten Bits. Die Anfangssequenzen sind die gleichen wie bei der Einfachübertragung. Im Ruhezustand sind die Leitungen CLOCK und DATA high. Wenn die erste fallende Flanke eintrifft, wird der Übertragungsmodus eingeleitet. Die Datenbits werden in gleicher Weise der Reihe nach übertragen, beginnend mit dem höchstwertigen Bit bei jeder steigenden Flanke des CLOCKs. Die Übertragung des niederwertigsten Bits zeigt an, dass alle Daten übertragen worden sind. Eine weitere steigende Flanke bringt die Datenleitung auf einen Low-Pegel, was das Ende der Datenübertragung anzeigt.
Angenommen, es liegen auch nach dem Ende der Übertragung noch kontinuierliche Takte vor (d. h. wenn innerhalb der Zeit tw [< tm] weitere Takte eintreffen), wird der Wert des Slave nicht aktualisiert. Dies liegt daran, dass der monostabile Ausgang noch instabil ist und sich der Wert im Schieberegister nicht geändert hat. Daher wird bei der nächsten steigenden Flanke, d.h. nach der steigenden Flanke (n+1), die Übertragung der gleichen Daten fortgesetzt, und das MSB der zuvor übertragenen Daten wird erneut übertragen. Dann wird das gleiche Verfahren wie bei den vorherigen Übertragungen angewandt, so dass dieselben Daten mehrfach übertragen werden. Der Slave-Wert wird nur dann aktualisiert, wenn die Zeit zwischen zwei Taktimpulsen länger ist als der Übertragungs-Timeout. Mehrere Übertragungen können zur Überprüfung der Datenintegrität verwendet werden. Die beiden nacheinander empfangenen Werte werden verglichen, und etwaige Unterschiede deuten auf Übertragungsfehler hin. Der Master steuert die Datenübertragung und kann jederzeit unterbrochen werden, indem er einfach die Taktfolge für einen Zeitraum unterbricht, der länger als die Timeout-Zeit ist. Der Slave erkennt automatisch den Übertragungs-Timeout und geht in den Idle-Modus.
Einige Hersteller von Positionssensoren haben dem grundlegenden SSI-Protokoll zusätzliche Informationen hinzugefügt, um eine hohe Integrität der Datenübertragung zu gewährleisten. Um die Sicherheit zu gewährleisten und das Ende der Datenübertragung zu signalisieren, können CRC- oder Paritätsbits hinzugefügt werden, mit denen überprüft wird, ob die Daten vom Positionssensor korrekt empfangen und interpretiert wurden.
Sensoren, die die SSI-Schnittstelle verwenden
Aufmerksamen Lesern ist vielleicht aufgefallen, dass in diesem Artikel der Begriff “Sensor” anstelle des gebräuchlicheren “Encoder” verwendet wird. Dies ist eine bewusste Wahl, da Encoder oft, aber fälschlicherweise, als optische Geräte angesehen werden, die Daten in Abhängigkeit von einer gemessenen Position erzeugen. In den letzten Jahren ist eine neue Generation von berührungslosen (meist absoluten) Encodern aufgetaucht, die nicht optisch, sondern induktiv arbeiten (auch “Incoder” genannt). Diese Geräte verwenden gedruckte Transformatoren anstelle der sperrigen und teuren Wicklungen, die in herkömmlichen induktiven Positionssensoren wie Resolvern, LVDTs, RVDTs und Synchronisierern verwendet werden. Diese traditionellen Geräte sind seit vielen Jahren die bevorzugte Wahl von Ingenieuren für verschiedene raue Umgebungen aufgrund ihrer Zuverlässigkeit, ihres hohen Sicherheitsgrades und ihrer berührungslosen Arbeitsweise. Incoder basieren auf den gleichen Prinzipien wie ihre traditionellen Gegenstücke und sind daher ebenso zuverlässig und robust, wie sie genauer und einfacher zu bedienen sind. Die Benutzerfreundlichkeit ergibt sich zum Teil aus der Verwendung der SSI-Schnittstelle als bevorzugte Kommunikationsart. In Anwendungen, in denen Sensoren mit hoher Zuverlässigkeit und Genauigkeit in der Medizin, der Industrie, der Luft- und Raumfahrt und im Verteidigungssektor benötigt werden, haben sie in durchkontaktierten und lagerlosen Versionen einen bedeutenden Marktanteil gewonnen.